HISTORIA POWSTANIA ECHOSONDY
- Historia echosond
- Zasada działania sonarów / echosond
- Optymalny sonar - echosonda
- Częstotliwość pracy sonaru
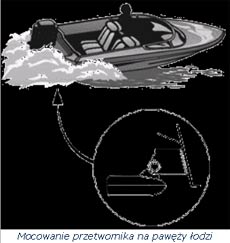
- Przetworniki
Skąd się wzięły echosondy - trochę historii.
Wynalezienie echosondy nie różni się niczym od wynalezienia koła, radia, telefonu czy telewizora. Po prostu istniała potrzeba znalezienia urządzenia które w prosty sposób wskaże głębokość oraz obecność ryb w danym miejscu. Ludzie zajmują się połowem ryb od tysięcy lat. Na początku ryby były podstawowym składnikiem diety ludzi żyjących nad wodą, aby w miarę udoskonalania metod połowu stać się towarem którym się wymieniano. Trochę później połów ryb stał się źródłem utrzymania dla części ludzi zwanych rybakami, którzy wyspecjalizowali się w ich połowie. Ponieważ w obecnych czasach większość ryb spożywanych na świecie pochodzi z hodowli zmalało znaczenie połowu siecią, a od ubiegłego wieku wzrosło zainteresowanie "sportowym połowem ryb na wędkę". Każdy z nas wędkarzy ma podstawowy problem wybierając się na ryby szybko znaleźć miejsce przebywania ryb i skłonić je do brań. Echosonda nie potrafi skłonić ryb do brania, pozwala jednak rozwiązać problem ich odnajdywania. Nie oszukuj się nie możesz złowić ryby jeśli nie łowisz w miejscach gdzie aktualnie przebywają. Właśnie z takiej potrzeby powstały pierwsze echosondy.
Każda echosonda używa SONAR-u w swojej pracy. Rozwój tej technologii (SOund NAvigation Ranging ) nastąpił w czasie II wojny światowej. Później pod koniec lat pięćdziesiątych, w Joplin w stanie Missouri Carl Lowrance i jego synowie Arlen oraz Darrell rozpoczęli nurkowanie z akwalungiem aby obserwować ryby i ich zwyczaje. W trakcie tych rekonesansów podwodnych doszli do wniosku (co później zostało potwierdzone przez inne źródła ) i odkryli, że większość ryb jest skupionych na bardzo niewielkim obszarze jeziora. Gdy tylko warunki otoczenia zmieniały się - (kierunek i siła wiatru, opady, spadek lub wzrost temperatury/ciśnienia ) ryby przemieszczały się do korzystniejszych dla nich w danych warunkach obszarów. Potwierdzono także wpływ podwodnych struktur (takich jak drzewa, rośliny, skały), temperatury, uciągu wody, nasłonecznienia oraz wiatru na większość gatunków ryb. Te oraz inne czynniki wpływały również na położenie pokarmu (alg i planktonu), a razem tworzyły warunki powodujące częste przemieszczanie się populacji ryb.
W tamtych czasach istniały jedynie duże, drogie i nieporęczne sonary. Pracujące z niską częstotliwością sonary wykorzystywały próżniowe lampy elektronowe, wymagające do pracy zasilania z dużych akumulatorów samochodowych. Pomimo, że mogły pokazywać zadowalający obraz dna oraz duże ławice ryb, nie potrafiły pokazywać pojedynczych ryb. Carl wraz z synami postawił sobie zadanie zbudowania echosondy o niewielkich rozmiarach, możliwą do przenoszenia, zasilaną z własnych baterii, potrafiącą wykrywać pojedyncze ryby i jednocześnie niedrogą. Między innymi dzięki wprowadzeniu do powszechnego użytku tranzystorów została wyprodukowana echosonda, która zmieniła wędkarstwo światowe na zawsze.

W 1957 roku wraz ze sprzedażą pierwszej tranzystorowej wędkarskiej echosondy utworzony został nowy przemysł. W listopadzie 1959 roku, Lowrance wprowadził "The Little Green Box" (Małe zielone pudełko) do sprzedaży, które stało się najbardziej popularną w tym czasie echosondą na świecie. Zbudowana na bazie tranzystorów, była pierwszą udaną konstrukcją echosondy wędkarskiej. W 1957 roku profesjonalne sonary były sprzedawane w cenie min. 2000 USD natomiast pierwsze echosondy Lowrance były kupowane za mniej niż 150 USD. Do roku 1984, kiedy ze względu na koszty zakończono jej produkcję, zostało wyprodukowanych ponad milion egzemplarzy tej pierwszej popularnej echosondy. Następnym etapem rozwoju echosond było zastosowanie papieru jako nośnika. Występowanie ryb, obraz dna i zmiany głębokości w czasie były drukowane na rolce papieru. Takie systemy są stosowane do dzisiaj na statkach handlowych. Technologia wyświetlaczy ciekłokrystalicznych umożliwiła miniaturyzację echosond i wyparła papier jako nośnik do prezentacji obrazu podwodnych struktur i ryb. Obecnie rozwój echosond zmierza w kierunku coraz większych wyświetlaczy o rozdzielczościach rzędu 240 pikseli w pionie w popularnych modelach i 800 pikseli w pionie w topowych modelach .
Stosuje się również selektywną penetrację wody przez zastosowanie przetworników wielostożkowych o różnych częstotliwościach pracy, mających większe efektywne kąty penetracji. Wzrost mocy powoduje że głębokości rzędu 300-400 metrów również nie stanowią bariery.
Zasada działania sonarów / echosond
Słowo "sonar" jest skrótem trzech wyrazów angielskich - "SOund, NAvigation, and Ranging"(dźwięk, nawigacja, lokalizacja). Podczas II Wojny Światowej nastąpił gwałtowny rozwój sonarów . Zostały one stworzone m.in. dla US Navy do lokalizacji łodzi podwodnych oraz do komunikacji między statkami. Głównymi elementami sonaru są przetwornik (pełniący rolę nadajnika i odbiornika sygnału dźwiękowego), układ elektroniczny wyzwalający i odbierający sygnał elektryczny z przetwornika oraz wyświetlacz.
Zasada działania sonaru w uproszczeniu jest następująca: impuls elektryczny pochodzący od nadajnika układu elektronicznego (oscylator /kwarc) jest przekształcany w przetworniku w falę dźwiękową o określonej częstotliwości i wysyłany w wodzie w wybranym kierunku. Kiedy fala dźwiękowa dotrze do podwodnego obiektu/przeszkody odbija się od niego i powraca. Echo to dociera z powrotem do przetwornika, który przekształca je w sygnał elektryczny wzmacniany następnie przez odbiornik układu elektronicznego i wysyłany dalej do wyświetlacza. Ponieważ prędkość fal dźwiękowych w wodzie jest znana i stała (wynosi około 1500 metrów na sekundę zależnie od temperatury) to przez pomiar tego krótkiego czasu jaki upłynął między wysłaniem i odebraniem sygnału można obliczyć odległość między przetwornikiem i obiektem od którego fala została odbita. Proces ten jest powtarzany wielokrotnie w ciągu każdej sekundy. Miękkie obiekty jak muliste dno mają tendencję do pochłaniania fali dźwiękowej. Twarde dno skaliste dużo mocniej odbija sygnał nie pochłaniając go.
Te subtelne różnice w otrzymywanym sygnale znajdują odzwierciedlenie w obrazie wyświetlanym na ekranie. Właśnie w ten sposób echosonda "czyta" dno i wszystko co się nad nim znajduje.
W echosondach najczęściej stosuje się częstotliwości pracy równe lub bliskie 200 kHz, jednak produkowane są również urządzenia wykorzystujące częstotliwość 50 kHz, 83kHz a nawet 455 kHz. Częstotliwości te znajdują się w spektrum dźwiękowym, ale nie są słyszalne ani przez ludzi, ani przez ryby. Nie ma obawy że sonar wystraszy ryby - one go nie słyszą.
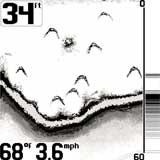
Jak to wynika z jego konstrukcji sonar wysyła i odbiera sygnały dźwiękowe, a następnie zamienione na sygnały elektryczne wyświetla je na wyświetlaczu. Ponieważ dzieje się to wielokrotnie w ciągu sekundy, to kolejne punkty odpowiadające poszczególnym odczytom głębokości tworzą w rezultacie ciągłą linię, która przedstawia zarys/kontur dna. Jak wyżej opisano, każdy obiekt między powierzchnią wody a dnem jest również rozróżniany (zostaje odbite echo) i wyświetlany na ekranie. Znając prędkość rozchodzenia się fal dźwiękowych w wodzie oraz czas powrotu echa, urządzenie oblicza i wskazuje głębokość wody oraz do każdej ryby znajdującej się w wodzie.
Optymalny sonar - echosonda
Na jakość sonaru wpływają cztery główne czynniki, przy czym optymalny sonar powinien posiadać następujące cechy:
-Duża moc nadajnika
-Wydajny i szybki przetwornik
-Czuły odbiornik
-Duży i kontrastowy wyświetlacz o jak największej rozdzielczości pionowej
Wszystkie powyżej wymienione elementy echosondy muszą być zaprojektowane do współpracy i niezależne od warunków pogodowych i ekstremalnych temperatur.
Im wyższa moc nadajnika tym większe prawdopodobieństwo, że możliwe będzie wykrycie powracającego echa w głębokich lub zanieczyszczonych/zasolonych wodach. Większa moc pozwala również na prawidłowe zaprezentowanie ławic drobnicy czy różnego rodzaju obiektów podwodnych.

Przetwornik ma za zadanie zamienić sygnał elektryczny z oscylatora/kwarcu na dźwięk z jak najmniejszymi stratami energii (działa podobnie do głośnika. Jego drugą funkcją jest zdolność do odebrania nawet najmniejszych fal dźwiękowych powracających z głębokiej wody lub pochodzących od małych ryb (działa podobnie jak mikrofon).
Sam układ elektroniczny odbiornika musi pracować z ekstremalnie szerokim zakresem mocy sygnału. Musi umieć przytłumić bardzo mocne sygnały, jak również wzmocnić te najsłabsze powracające z przetwornika. Poza tym odbiornik odseparowuje obiekty podobne do siebie, rozróżnia odbicia powracające od tego samego obiektu i następnie w wyrazisty, przejrzysty sposób przedstawia te odbicia na wyświetlaczu. Ważną więc rolą odbiornika jest zastosowany algorytm separacji odbić i ich interpretacji.
Dobry wyświetlacz musi posiadać wysoką rozdzielczość (szczególnie ilość pikseli w pionie) oraz wyraźny kontrast, aby poprawnie zaprezentować wszystkie szczegóły czysto i ostro. Tylko takie wyświetlacze pozwalają przedstawić drobne szczegóły ukształtowania dna oraz łuki ryb (Arches) będące ich rzeczywistym odbiciem. Dla przykładu na głębokości 15 metrów jeden punkt na wyświetlaczu 128x64 odpowiada 11,72 cm, na wyświetlaczu 320x320 już tylko 4,69 cm.
Częstotliwość pracy sonaru
Większość sonarów pracuje na częstotliwościach około 200 kHz, a kilka dodatkowo na 50 kHz, 83kHz (HUMMINBIRD DualBeam ) i 455kHz (HUMMINBIRD TriBeam).
Oba zakresy częstotliwości mają swoje zalety, ale dla większości zastosowań w wodach śródlądowych i w większości morskich częstotliwość 200 kHz jest najlepszym wyborem. Częstotliwości te dają największą szczegółowość, lepiej pracują w płytkich wodach oraz przy dużych prędkościach, generują mniej szumów i niepożądanych ech. Separacja obiektów jest również najlepsza przy tych częstotliwościach. Separacja obiektów to zdolność do wyświetlania na ekranie dwóch ryb przebywających blisko siebie jako dwóch osobnych ech. Dla echosond HUMMINBIRD pracujących na częstotliwości 200kHz separacja wynosi ok. 6,25 cm.
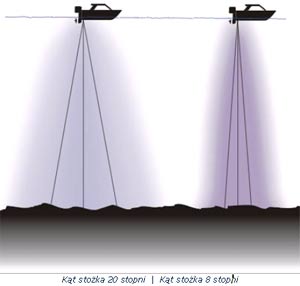
Jednak istnieją pewne zastosowania gdzie częstotliwości pracy mniejsze od 200 kHz są lepsze. Sonar pracujący na np. 83kHz może penetrować wodę do większych głębokości niż jednostki z wyższymi częstotliwościami (te same warunki i moc przetwornika). Jest to spowodowane naturalną zdolnością wody do pochłaniania fal dźwiękowych. Współczynnik pochłaniania jest większy dla wyższych częstotliwości dźwięku. Stożki fal dźwiękowych 83 kilohercowych przetworników są szersze niż przetworników 200 kHz (DualBeam 60 stopni). Są więc z tego względu najlepszym rozwiązaniem na płytkich łowiskach gdzie sam wąski stożek 20 stopni przetwornika 200kHz nie wystarcza. Użycie wymyślonej przez HUMMINBIRD częstotliwości 455kHz powiększa możliwości echosondy o penetrację dwóch bocznych szerokich stożków (QuadraBeam 2x45 stopni) które zwiększają efektywny kąt penetracji do 90 stopni. Zawsze należy pamiętać że obraz struktury dna i aktualnej głębokości pochodzi ze środkowego wąskiego stożka 200kHz - więc dodatkowe stożki umożliwiają jedynie identyfikację ryb w szerszym obszarze wody.
W podsumowaniu, różnice między tymi częstotliwościami są następujące:
| 192 lub 200 kHz | 50 kHz lub 83kHz |
| - Mniejsze głębokości. - Węższy stożek. - Lepsza definicja i separacja obiektów. - Mniejsza wrażliwość na szumy. |
- Większe głębokości. - Szerszy stożek. - Gorsza definicja i separacja obieków. - Większa wrażliwość na szumy. |