 |
NOWOŚCI
WPROWADZENIE do technologii SONARU
- Elementy systemu sonaru
- Jak działa sonar w echosondzie
NOWOŚĆ 2005, Technologia trójwymiarowa w HUMMINBIRD model MATRIX 47x
- Trójwymiarowa technologia Humminbird
- Korzyści z technologii trójwymiarowej 3D Sonar
- Większa moc wyjściowa sygnału
- Dokładna Separacja obiektu
- Selektywna identyfikacja obiektów ( ryb ) FISH ID+TM
- Technologia True-ArchTM (łuki ryb)
- Uwydatnienie Echa Sonaru SEETM
- Sonar pracujący w czasie rzeczywistym RTSTM
- Szumy ( zakłócenia ang.Noise)
WPROWADZENIE do technologii SONARU
Elementy systemu sonaru
Każdy system sonaru (echosonda) składa się z dwóch podstawowych elementów:
- Echosondy w której znajduje się wyświetlacz LCD, mikroprocesor i obwody nadawania / odbioru sygnału przetwornika. Montuje się go w miejscu widocznym dla wędkarza.
- Przetwornika który zawiera ceramiczny elektryczny element nadający / odbierający sygnał dźwiękowy, podłączony do echosondy przez kabel koncentryczny.
Musi być zamontowany tak aby miał stały kontakt z wodą.
|

ECHOSONDA

PRZETWORNIK
|
| |
|
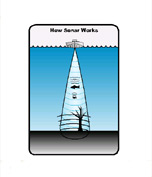
Jak działa sonar w echosondzie
- Sonar emituje w wodzie precyzyjne impulsy dźwiękowe ("Ping") które rozchodzą się w wodzie w formie wiązki o kształcie "kropli wody".
- Impulsy dźwiękowy odbijają się od obiektów w wodzie takich jak dno, ryby i inne zanurzone obiekty (nawet pęcherzyki powietrza).
- Odbite impulsy dźwiękowe są wyświetlane na ekranie LCD echosondy.Za każdym razem gdy nowe odbicia są otrzymywane, stare odbicia przesuwają się w lewo na ekranie LCD, tworząc efekt przesuwania się widoku (scrolling effect).
- Gdy wszystkie te odbicia są wyświetlone jedno obok drugiego na ekranie LCD tworzy się łatwy do interpretacji obraz dna, ryb i obiektów pod wodą.
|
|
| |
|
Obraz który widzisz na ekranie LCD
|
|

HUMMINBIRD Fishfinder 525 / Matrix 17
|
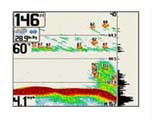
HUMMINBIRD Matrix 97x
|
| |
|
NOWOŚĆ 2005
Technologia trójwymiarowa w HUMMINBIRD
model MATRIX 47x
Trójwymiarowa technologia Humminbird
- Technologia trójwymiarowa HUMMINBIRD 3D Sonar wykorzystuje pomiar głębokości z sześciu stożków/wiązek sygnału aby uzyskać trójwymiarowy zarys dna od lewej do prawej burty . Gdy łódź się przemieszcza, historia pomiarów wyświetlona na ekranie LCD tworzy trójwymiarowy obraz dna i obiektów nad nim się znajdujących.
- Sześć 16° 455kHz wiązek sygnału tworzy 53° całkowity kąt pokrycia który ma zasięg do 72 metrów głębokości .
- Trójwymiarowy sonar 3D mierzy głębokość także między poszczególnymi wiązkami co daje razem 11 odczytów głębokości. Właśnie ta funkcja powoduje że zarys dna jest bardzo dokładny.
- Dwuwymiarowy obraz dna uzyskiwany jest z odczytu dwóch pośrednich stożków sygnału 455kHz i ma zasięg do 108 metrów(360 feet).
- Dla penetracji głębszych warstw wody możliwe jest użycie przetwornika dwustożkowego (opcja) o częstotliwości 83kHz o zasięgu do 300 metrów.
|

|
| |
|
Korzyści z technologii trójwymiarowej 3D Sonar
- technologia trójwymiarowa 3D sprawdza się najlepiej w odwzorowywaniu dna strumieni, rzek , kanałów, spadków dna a także wraków statków i innych obiektów zanurzonych związanych z dnem.
- technologia 3D sonduje występowanie ryb od burty do burty i następnie umiejscawia występowanie ryb w odpowiedniej odległości od dna.
- technologia 3D pokazuje cieniowany obraz dna, który to sposób można ręcznie ustawić (światło/cień) co powoduje że obraz jest bardzo rzeczywisty i czytelny.
- technologia 3D daje najszerszy i najdokładniejszy obraz zarysu dna oraz występowania obiektów zanurzonych jak pojedyncze ryby , ławice , przeszkody podwodne, wraki, drzewa, kamienie itd. przy dostępnej cenie urządzenia. Dwuwymiarowy obraz w tej technologii jest jednocześnie także dostępny.
|

|
 |

|
Technologia trójwymiarowa 3D jest stosowana wyłącznie w echosondach marki HUMMINBIRD.
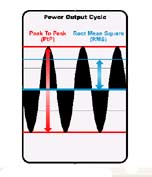
Większa moc wyjściowa sygnału
Moc wyjściowa jest wartością energii generowanej przez nadajnik. Jest ona mierzona na dwa sposoby:
- Uśredniona moc w okresie (RMS). RMS jest najbardziej wiarygodną metodą.
- Od szczytu do szczytu (PTP). PTP jest podstawową metodą niezbyt dokładną.
Korzyści ze zwiększonej mocy wyjściowej
- Zdolność do detekcji mniejszych obiektów w większej odległości.
- Zdolność do unikania "zakłóceń"
- Lepsze właściwości przy dużych prędkościach (środowisko dużych zakłóceń)
- Zwiększenie zakresu pomiaru głębokości.
Humminbird używa zmiennej mocy do warunków ekstremalnych i zawsze używa uśrednionej mocy jako główny wskaźnik.
|
 |
| |
|
Dokładna Separacja obiektuTM
Separacja obiektu, to minimalna odległość pomiędzy obiektami wykrytymi przez sonar.
- Sonar Humminbird rozpoznaje obiekty oddalone o 65mm od siebie.
- Doskonała separacja dostarcza lepszej informacji o blisko od siebie płynących rybach i rybach znajdujących się blisko dna.
- Aktualnie są prowadzone prace nad sonarem HUMMINBIRD rozróżniającym obiekty w odległości 20mm od siebie.
|

|
| |
|
Selektywna identyfikacja obiektów ( ryb ) FISH ID+TM
Selektywna identyfikacja FISH ID+TM analizuje w milisekundzie echo aby zidentyfikować rybę
- Echo ryby ma skłonność do bycia innym niż echa innych obiektów ( ale nie zawsze ); oparte to jest na badaniach laboratoryjnych.
- Mikroprocesor echosondy może zobaczyć detale w sygnale sonaru ( przetwornika ), jakich nie zobaczy ludzkie oko.
- Jako wynik pracy procesora okazuje ikonkę ryby i "czysty" sygnał sonaru w celu dostarczenia maximum informacji dla użytkownika.
|
|
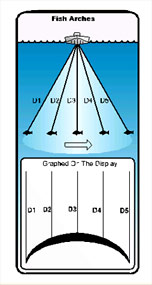
Technologia True-ArchTM (łuki ryb)
Łuki odwzorowujące ryby czyliTM Technologia TruArchTM pokazuje łuk ryby ze stożka 60° i wysoko czułego odbiornika.
- Łuk ryby, to po prostu echo od obiektu poruszającego się w stożku podczas kolejnych pomiarów. Dystans do obiektu najpierw maleje, a potem rośnie odpowiednio do geometrii stożka.
- Wielu wędkarzy woli widzieć rzeczywiste łuki ryb (czyli ich rzeczywiste odbicia), zamiast ikonek ryb. Pozwala im to przy dużym doświadczeniu określić wielkość i nawet gatunek ryby.
|
| |
|
Uwydatnienie Echa Sonaru SEETM
Technologia Sonar Echo EnhancementTM ciągle ewoluuje i optymalizuje wiele zmiennych w systemie, aby dostarczyć maksymalną ilość detali na ekranie.
Rezultatem technologii SEE jest:
- Sonar pokazuje w wodzie tylko to co interesuje wędkarza: ławice małych ryb, powierzchniowe zakłócenia wody, ryby, strukturę dna i termokliny.
|
Sonar pracujący w czasie rzeczywistym RTSTM
RealTimeSonarTM nadaje i odbiera sygnały "pingi" z echosondy w najkrótszym możliwym czasie w zależności od głębokości i gęstości wody nawet do 100 razy w ciągu sekundy i natychmiast wyświetla je na ekranie LCD.
- Więcej odebranych sygnałów tworzy obraz o większości ilości detali. RTS pracuje średnio 40 razy na sekundę więc nie ma możliwości aby przy dużej prędkości płynięcia nie zauważyć ryby czy ławicy.
- RTS może pracować do 100 razy na sekundę w bardzo płytkiej wodzie.
|

|
| |
|
Szumy (zakłócenia ang.Noise)
Szum to niepożądany sygnał z sonaru zbierany do odbiornika. Szum jest widoczny na ekranie LCD jako małe punkty lub linie.
Szum może być spowodowany przez:
- Szum elektryczny od świec zapłonowych, pomp zęzowych i radia.
- Od innych echosond pracujących na tej samej częstotliwości.
- Szum hydroakustyczny od obracającej się śruby napędowej.
- Od generowanego szumu przez wodę podczas płynięcia z dużą prędkością.
Niskie częstotliwości są bardziej podatne na szum od wyższych częstotliwości.
Wyższe modele HUMMINBIRD posiadają aktywny filtr cyfrowy, który eliminuje szumy (zakłócenia).
|

|
| |
|
|
|
)
)
)
)
)
)
)
)
)
)
)
)